


상속
•
상속
•
오버라이딩
•
예시 코드
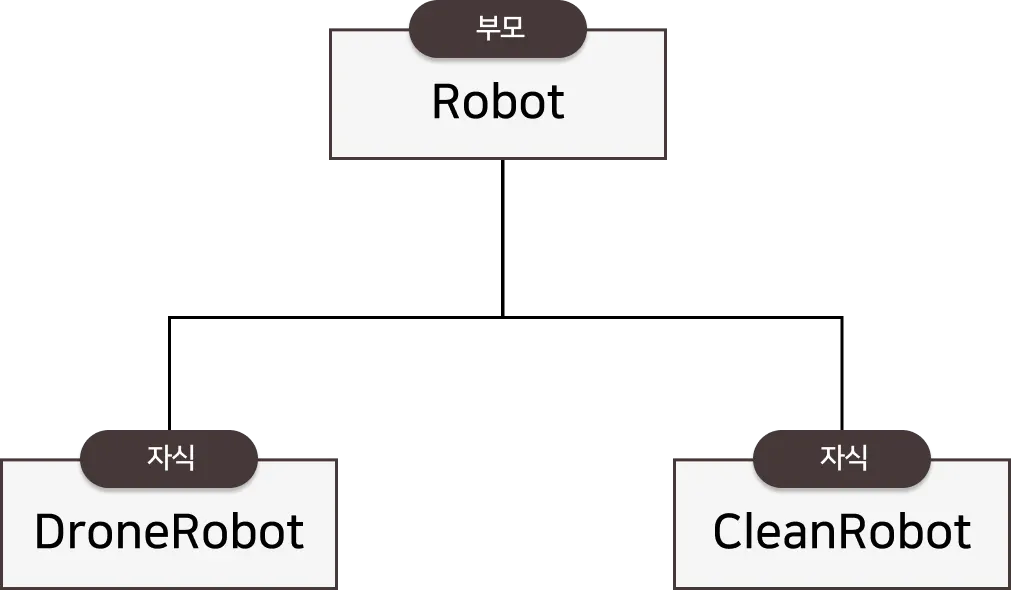
상속(Inheritance)
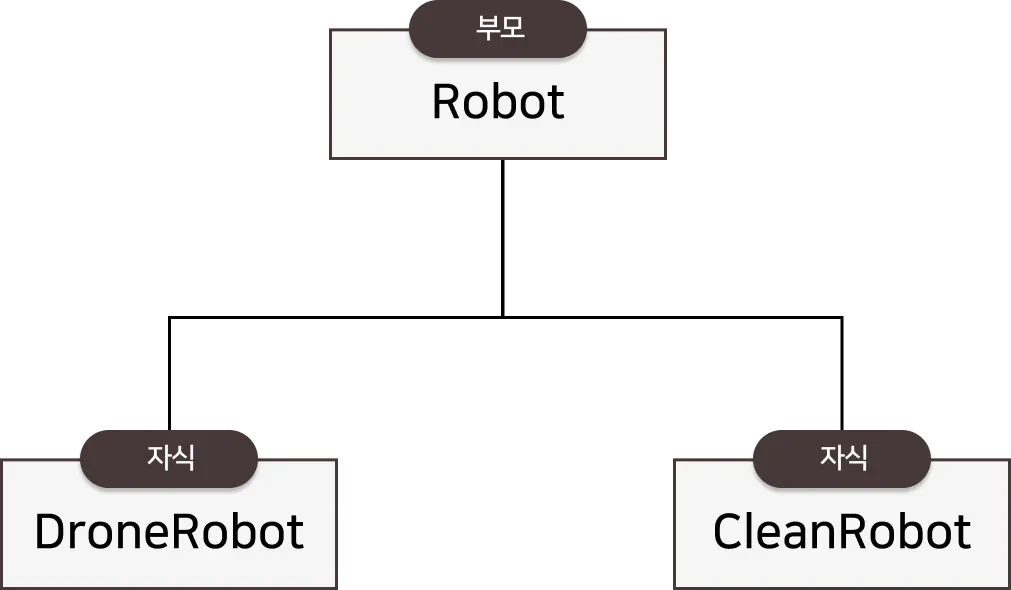

부모 클래스의 변수와 메소드를 자식 클래스에서 재사용하는 것
class 부모클래스:
pass
class 자식클래스(부모클래스):
pass
Python
복사
오버라이딩
자식 클래스에서 부모 클래스의 메소드를 재정의 하는 것
예시 코드
•
부모 클래스 : Robot.py
•
자식 클래스 : DroneRobot.py, CleanRobot.py
# 부모 클래스 - Robot
class Robot:
# 생성자
def __init__(self, name, power, battery):
self.name = name
self.power = power
self.battery = battery
# 메소드 - 전원, 이동, 충전
def power(self, power):
self.power = power
print('power : ', power)
def move(self, direction):
print('{} (으/)로 이동합니다.'.format(direction))
def charge(self):
self.battery = 100
print('충전이 완료되었습니다.')
# 자식 클래스 - DroneRobot, CleanRobot
# 상속 정의 : class 클래스명(부모클래스):
# 드론
class DroneRobot(Robot):
# 부모 클래스의 변수와 메소드를 모두 재사용한다.
# 단, 프라이빗 멤버는 상속되지 않음
# 최대 높이
max_height = 50
# super() : 자식 클래스의 생성자에서 부모클래스의 생성자를 호출하는 메소드
def __init__(self, name, power, battery, height):
# self.name = name
# self.power = power
# self.battery = battery
super().__init__(name, power, battery)
self.height = height
# 오버라이딩
# : 부모 클래스의 메소드를 자식 클래스에서 재정의하는 것
def move(self, direction, height):
if height > DroneRobot.max_height:
print('{}m 이상으로는 비행할 수 없습니다'.format(DroneRobot.max_height))
return
self.height = height
print('고도 : {}'.format(height))
print('{} (으/)로 방향으로 비행합니다.'.format(direction))
# 로봇 청소기
class CleanRobot(Robot):
max_bin = 50
# 생성자
def __init__(self, name, power, battery, bin):
super().__init__(name, power, battery)
self.bin = bin
# 메소드 오버라이딩
def move(self, direction):
print('{} 으(/로) 이동하여 청소합니다.'.format(direction))
self.bin += 1 # 먼지 흡입
def mapping(self):
print('청소할 영역을 기억합니다.')
# 먼지통 비우기
def vacate(self):
self.bin = 0
print('먼지통을 비웁니다.')
# 객체 생성
print('# Robot #')
robot = Robot('휴먼로봇', 'ON', 100)
robot.move('왼쪽') # 위쪽, 아래쪽, 왼쪽, 오른쪽
robot.charge()
print('# DroneRotbot #')
drone = DroneRobot('드론로봇', 'ON', 100, 10)
drone.move('앞쪽', 50)
print('# CleanRobot #')
cleanRobot = CleanRobot('로봇청소기', 'ON', 100, 0)
cleanRobot.mapping()
cleanRobot.move('앞쪽')
cleanRobot.vacate()
Python
복사
클래스 파일 나누어서 작성해보기
•
Robot.py
•
DroneRobot.py
•
CleanRobot.py
•
Main.py
Robot.py
# Robot.py
class Robot:
def __init__(self, name, power, battery):
self.name = name
self.power = power
self.battery = battery
def power(self, power):
self.power = power
print('power : ', power)
def move(self, direction):
print('{} (으/)로 이동합니다.'.format(direction))
def charge(self):
self.battery = 100
print('충전이 완료되었습니다.')
Python
복사
DroneRobot.py
# DroneRobot.py
from Robot import Robot
class DroneRobot(Robot):
max_height = 50
def __init__(self, name, power, battery, height):
super().__init__(name, power, battery)
self.height = height
def move(self, direction, height):
if height > DroneRobot.max_height:
print('{}m 이상으로는 비행할 수 없습니다'.format(DroneRobot.max_height))
return
self.height = height
print('고도 : {}'.format(height))
print('{} (으/)로 방향으로 비행합니다.'.format(direction))
Python
복사
CleanRobot.py
# CleanRobot.py
from Robot import Robot
class CleanRobot(Robot):
max_bin = 50
def __init__(self, name, power, battery, bin):
super().__init__(name, power, battery)
self.bin = bin
def move(self, direction):
print('{} 으(/로) 이동하여 청소합니다.'.format(direction))
self.bin += 1
def mapping(self):
print('청소할 영역을 기억합니다.')
def vacate(self):
self.bin = 0
print('먼지통을 비웁니다.')
Python
복사
Main.py
# Main.py
from Robot import Robot
from DroneRobot import DroneRobot
from CleanRobot import CleanRobot
print('# Robot #')
robot = Robot('휴먼로봇', 'ON', 100)
robot.move('왼쪽')
robot.charge()
print('# DroneRotbot #')
drone = DroneRobot('드론로봇', 'ON', 100, 10)
drone.move('앞쪽', 50)
print('# CleanRobot #')
cleanRobot = CleanRobot('로봇청소기', 'ON', 100, 0)
cleanRobot.mapping()
cleanRobot.move('앞쪽')
cleanRobot.vacate()
Python
복사